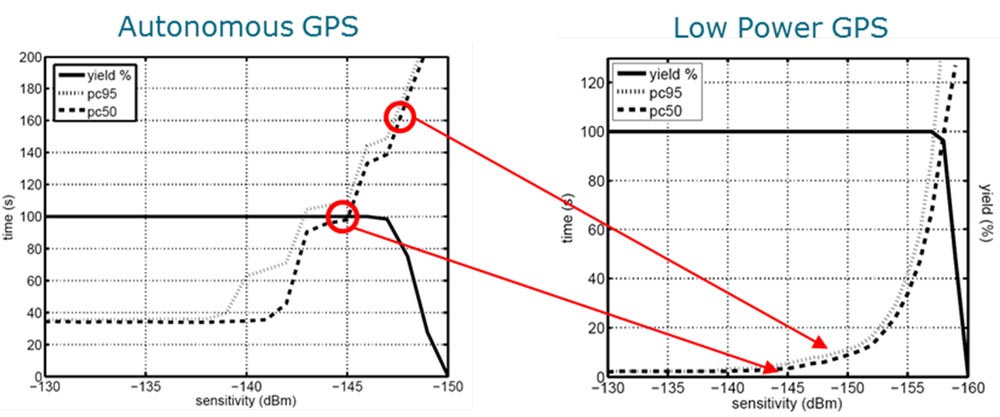
With advanced location-solving algorithms, the Abeeway platform and trackers bring you geolocation intelligence fit for many existing and new use cases. Usual trackers typically need long synchronization time to GPS signals resulting to extended power-consuming receive time. Meanwhile, Abeeway trackers only need a few seconds. Our better quality of service, extended battery life, and smartly configured multimodal behavior gives you all the reliability and versatility you need.
Take a closer look at our breakthrough LP-GPS technology to understand how we achieved that!
GPS (Global Position System) is the most widely used Global Navigation Satellite System to provide continuous positioning and timing information data. GPS is a constellation of satellites continuously broadcasting a radio signal containing satellite status, clock information, ephemeris data giving accurate satellite position and almanac defining the orbits of all satellites.
A GPS receiver intercepts signals from visible satellites to determine how far away each satellite are. Those distances combined with the ephemeris data allow the calculation of the position of the receiver using the technique called “trilateration”. At a minimum, four satellites must be in view of the receiver for it to compute four unknown quantities: latitude, longitude, altitude and clock deviation from satellite time. In a typical GPS device, all the processing is made by the chipset, which requires a lot of processing time and therefore energy.
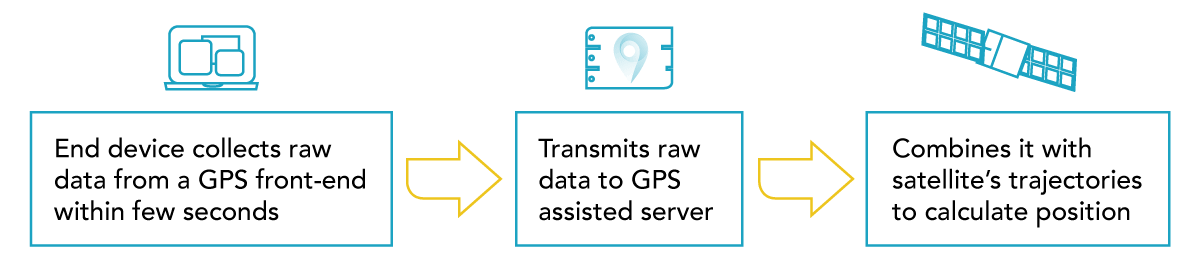
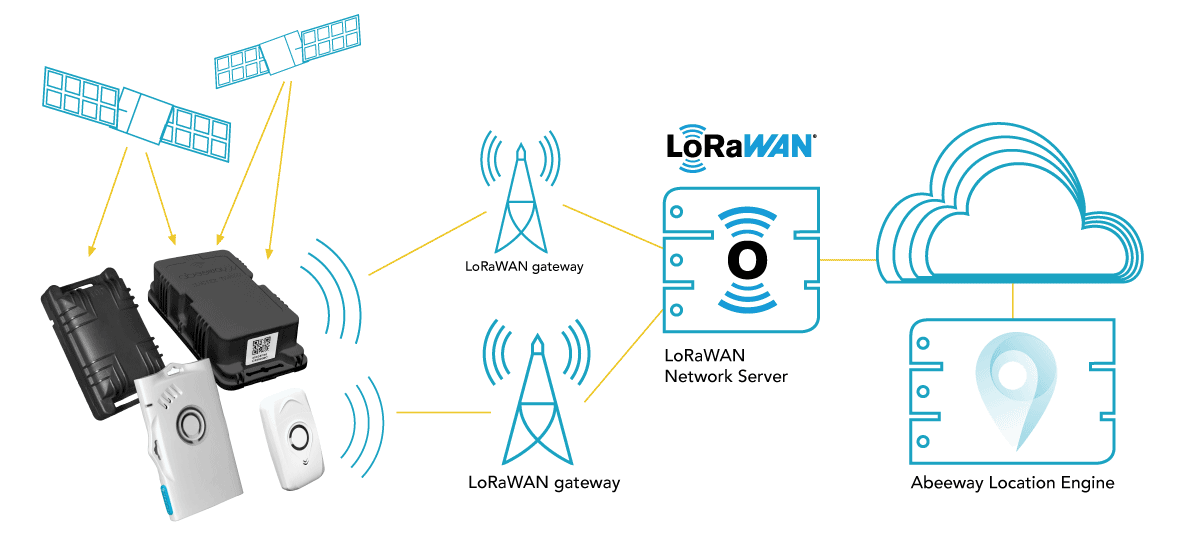
With Low Power GPS technology, the tracker only collects raw data from satellites, then transmits it to Abeeway’s geolocation server through the LPWAN (e.g. LoRAWAN) network. The server combines this information with known satellite trajectories to calculate the final position. The data on the ephemerids and the almanac is already available in the server and does not have to be collected by the device saving significant power for the tracker by improving the time to acquire GPS signal. Therefore, the whole processing is made “in the cloud”, which is much faster than inside the device, and does not waste its energy for calculation.
On asynchronous networks such as LoRaWAN networks, the transmission delay is deterministic: Abeeway patented LP-GPS algorithm leverages the network time information to compute positions with only 3 satellites, further enhancing success rates and further improving Time-to-First Fix and energy consumption.
Test drive using a tracker reporting successive positions with GPS/LP GPS/WIFI. It shows that in urban area Low Power GPS is far superior than GPS. The tracker was initially placed in a car parked underground. The regular GPS was able to give a first fix after about 20 minutes, during that period LP-GPS and WiFi sniffing achieved more than a dozen fixes.

Abeeway Location Engine, which leverages multiple geolocation technologies, including LP-GPS, is integrated into Actility’s ThingPark® Location, which is an ideal solution for your IoT tracking use cases. It combines low power communication using LoRaWAN®, with advanced location solving algorithms and low power location technologies using Wifi and GPS with patented optimization for low power IoT constraints.
