Con algoritmos avanzados de resolución de ubicación, la plataforma y los rastreadores de Abeeway te brindan inteligencia de geolocalización adecuada para muchos escenarios de aplicaciön existentes y nuevos. Los rastreadores habituales suelen necesitar un largo tiempo de sincronización a las señales GPS, lo que resulta en un tiempo prolongado de recepción que consume más energía. Por su parte, los rastreadores de Abeeway sólo necesitan unos segundos. Nuestra mejor calidad de servicio, vida útil de la batería prolongada y comportamiento multimodal configurado de manera inteligente te brindan toda la confiabilidad y versatilidad que necesita.
Eche un vistazo más de cerca a nuestra tecnología revolucionaria de LP-GPS para comprender cómo logramos eso.
GPS (Sistema de Posicionamiento Global) es el Sistema Global de Navegación por Satélite más ampliamente utilizado para proporcionar información continua de posicionamiento y tiempo. El GPS es una constelación de satélites que emiten continuamente una señal de radio que contiene el estado de los satélites, información de reloj y datos efemérides que proporcionan una posición precisa de los satélites, así como un almanaque que define las órbitas de todos los satélites.
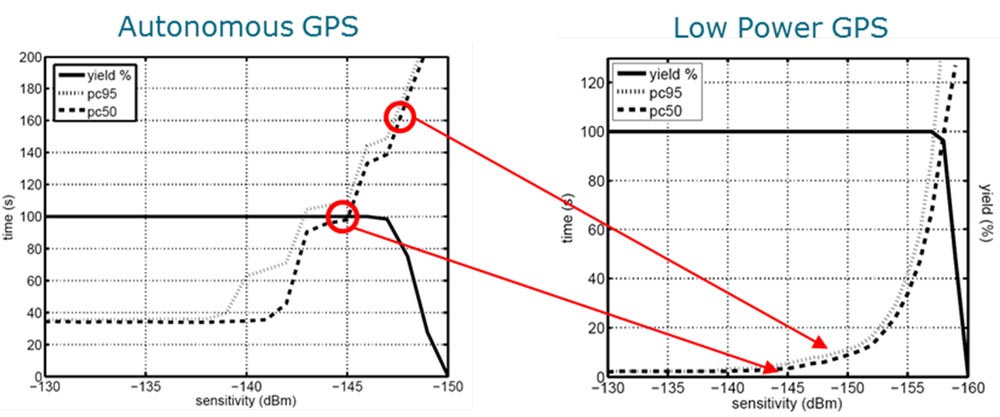
Un receptor GPS intercepta las señales de los satélites visibles para determinar la distancia a la que se encuentra cada satélite. Esas distancias, combinadas con los datos efemérides, permiten el cálculo de la posición del receptor utilizando la técnica llamada «trilateración». Como mínimo, cuatro satélites deben estar a la vista del receptor para que pueda calcular cuatro cantidades desconocidas: latitud, longitud, altitud y desviación del reloj con respecto al tiempo del satélite. En un dispositivo GPS típico, todo el procesamiento se realiza en el chipset, lo cual requiere mucho tiempo de procesamiento y, por lo tanto, energía.
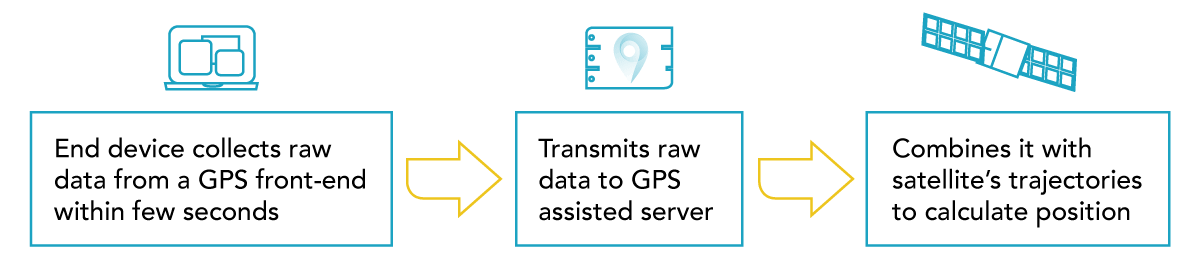
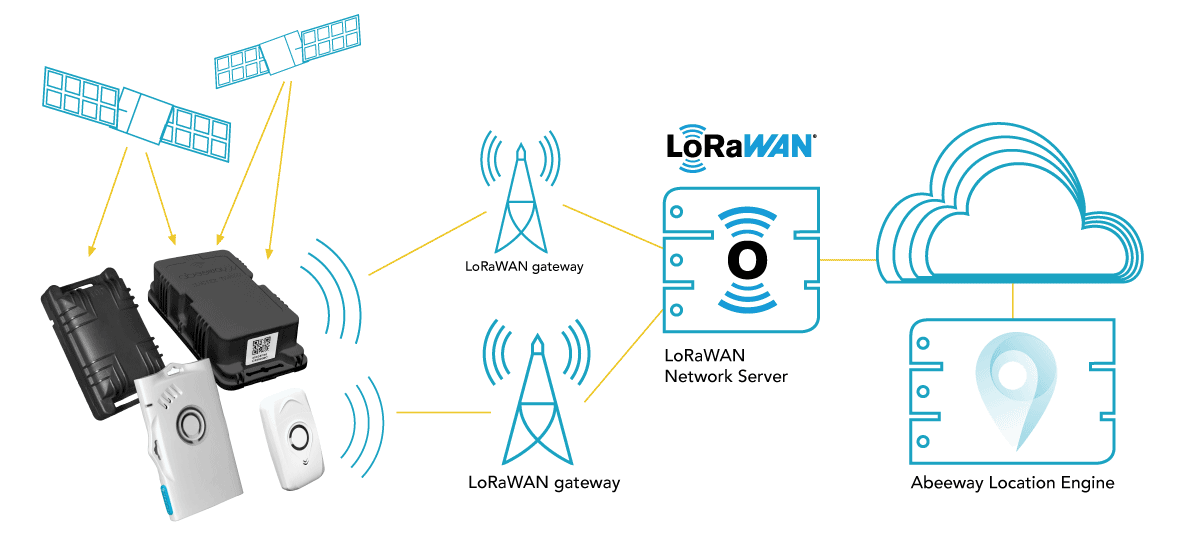
Con la tecnología de GPS de bajo consumo, el rastreador solo recopila datos sin procesar de los satélites y luego los transmite al servidor de geolocalización de Abeeway a través de la red LPWAN (por ejemplo, LoRaWAN). El servidor combina esta información con las trayectorias conocidas de los satélites para calcular la posición final. Los datos sobre los efemérides y el almanaque ya están disponibles en el servidor y no es necesario que sean recopilados por el dispositivo, lo que ahorra una cantidad significativa de energía para el rastreador al mejorar el tiempo de adquisición de la señal GPS. Por lo tanto, todo el procesamiento se realiza «en la nube»que es mucho más rápida que dentro del dispositivo, y no gasta su energía en cálculos.
En redes asíncronas como las redes LoRaWAN, el retraso de transmisión es predecible: el algoritmo patentado LP-GPS de Abeeway utiliza la información de tiempo de red para calcular posiciones con solo 3 satélites, mejorando aún más las tasas de éxito y optimizando el tiempo de primera corrección y el consumo de energía.
Prueba de conducción utilizando un rastreador que informa posiciones sucesivas con GPS/LP GPS/WIFI. Esto demuestra que en áreas urbanas, el GPS de baja potencia es muy superior al GPS convencional. El rastreador fue colocado inicialmente en un automóvil estacionado en un sótano. El GPS convencional pudo obtener una primera posición después de aproximadamente 20 minutos, durante ese período el LP-GPS y el análisis de señales WiFi lograron más de una docena de posiciones.

El Abeeway Location Engine, aprovecha múltiples tecnologías de geolocalización, incluido LP-GPS, está integrado en ThingPark® Location de Actility, lo cual lo convierte en una solución ideal para tus casos de uso de seguimiento de IoT. Combina comunicación de baja potencia utilizando LoRaWAN®, con algoritmos avanzados de resolución de ubicación y tecnologías de ubicación de baja potencia utilizando Wifi y GPS con optimización patentada para las limitaciones de energía baja de IoT.
