Grâce à des algorithmes avancés de résolution de problèmes de localisation, la plateforme Abeeway et les trackers vous apportent une intelligence de géolocalisation adaptée à de nombreux cas d’utilisation existants et nouveaux. Les traceurs habituels ont généralement besoin d’un long temps de synchronisation avec les signaux GPS, ce qui se traduit par une consommation d’énergie prolongée lors de la réception. Quant aux traqueurs d’Abeeway, ils n’ont besoin que de quelques secondes. Notre meilleure qualité de service, notre durée de vie prolongée de la batterie et notre comportement multimodal intelligemment configuré vous offrent toute la fiabilité et la polyvalence dont vous avez besoin.
Examinez de plus près notre technologie révolutionnaire LP-GPS pour comprendre comment nous y sommes parvenus !
GPS (Global Position System) est le système mondial de navigation par satellite le plus utilisé pour fournir des données de positionnement et de synchronisation en continu. Le GPS est une constellation de satellites qui émettent en permanence un signal radio contenant l’état des satellites, des informations sur l’horloge, des données éphémérides donnant la position précise des satellites et un almanach définissant les orbites de tous les satellites.
Un récepteur GPS intercepte les signaux des satellites visibles pour déterminer la distance qui les sépare. Ces distances combinées aux données de l’éphéméride permettent de calculer la position du récepteur en utilisant la technique dite de « trilatération ». Au minimum, quatre satellites doivent être en vue du récepteur pour que celui-ci puisse calculer quatre quantités inconnues : la latitude, la longitude, l’altitude et l’écart de l’horloge par rapport à l’heure du satellite. Dans un appareil GPS classique, tout le traitement est effectué par le chipset, ce qui nécessite beaucoup de temps de traitement et donc d’énergie.
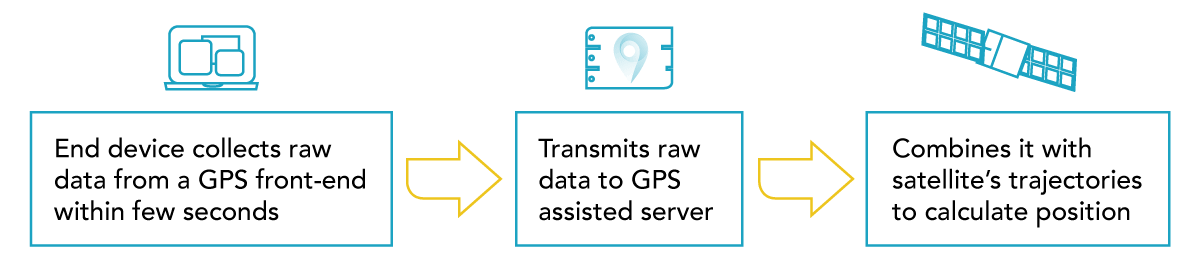
Grâce à la technologie GPS basse consommation, le traceur ne fait que collecter des données brutes à partir des satellites, puis les transmet au serveur de géolocalisation d’Abeeway par l’intermédiaire du réseau LPWAN (par exemple LoRAWAN). Le serveur combine ces informations avec les trajectoires connues des satellites pour calculer la position finale. Les données relatives aux éphémérides et à l’almanach sont déjà disponibles sur le serveur et n’ont pas besoin d’être collectées par l’appareil, ce qui permet d’économiser une grande partie de l’énergie du traceur en améliorant le temps d’acquisition du signal GPS. Par conséquent, l’ensemble du processus est réalisé
« dans le nuage »
qui est beaucoup plus rapide qu’à l’intérieur de l’appareil, et qui ne gaspille pas son énergie pour le calcul.
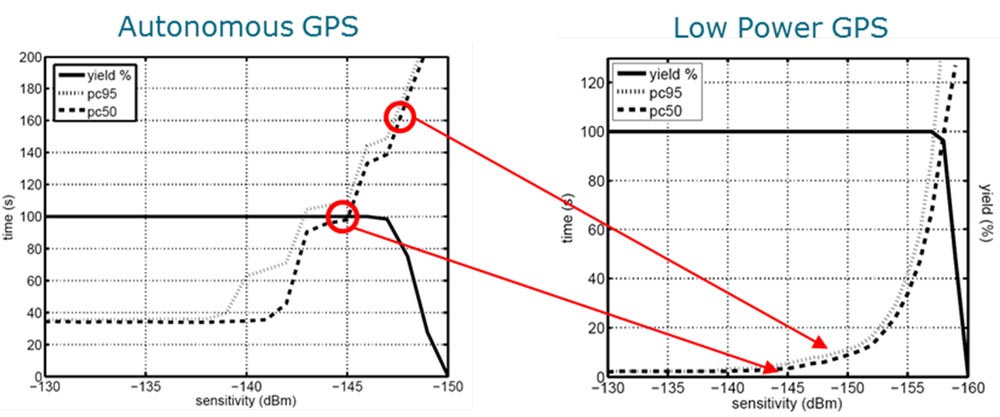
Sur les réseaux asynchrones tels que les réseaux LoRaWAN, le délai de transmission est déterministe : L’algorithme LP-GPS breveté d’Abeeway exploite les informations temporelles du réseau pour calculer les positions avec seulement 3 satellites, ce qui améliore encore les taux de réussite et le temps jusqu’à la première fixation ainsi que la consommation d’énergie.
Essai de conduite à l’aide d’un traceur signalant des positions successives par GPS/LP GPS/WIFI. Cela montre que dans les zones urbaines, le GPS à faible puissance est de loin supérieur au GPS. Le traceur a d’abord été placé dans une voiture garée sous terre. Le GPS classique a pu donner une première position après environ 20 minutes, tandis que le LP-GPS et le reniflage WiFi ont permis d’obtenir plus d’une douzaine de positions.

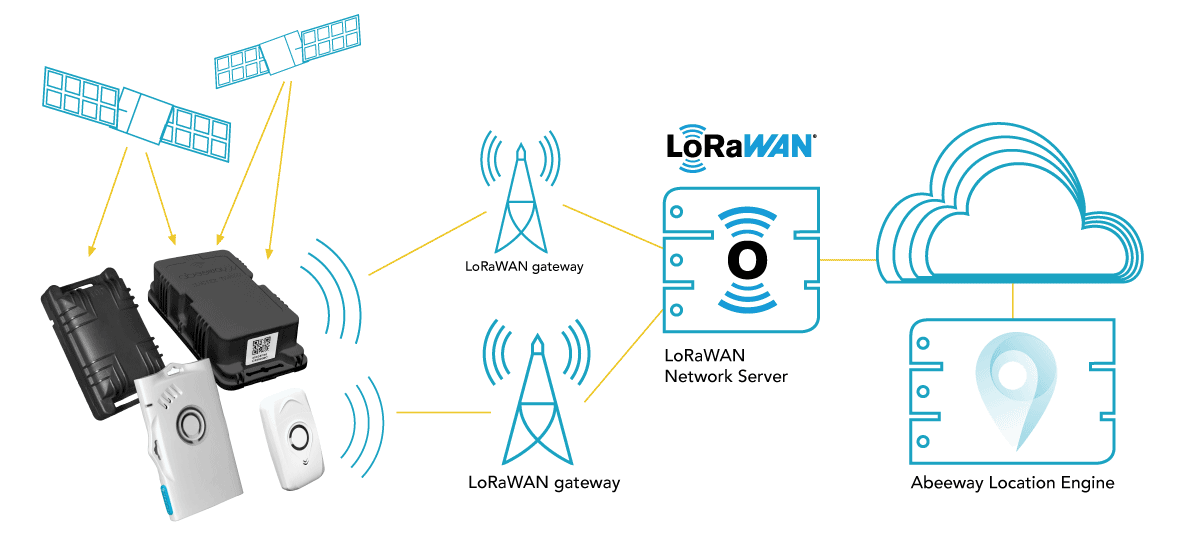
Abeeway Location Engine, qui exploite plusieurs technologies de géolocalisation, y compris LP-GPS, est intégré dans ThingPark® Location d’Actility, qui est une solution idéale pour vos cas d’utilisation de suivi de l’IoT. Il combine une communication basse consommation utilisant LoRaWAN®, avec des algorithmes avancés de résolution de localisation et des technologies de localisation basse consommation utilisant le Wifi et le GPS avec une optimisation brevetée pour les contraintes IoT basse consommation.
