Grazie agli algoritmi avanzati di risoluzione della posizione, la piattaforma e i tracker di Abeeway offrono informazioni sulla geolocalizzazione adatte a molti casi d’uso esistenti e nuovi. I normali tracker hanno bisogno di un lungo tempo di sincronizzazione con i segnali GPS e quindi di un tempo di ricezione che consuma molta energia. Nel frattempo, i tracker Abeeway richiedono solo pochi secondi. La migliore qualità del servizio, la maggiore durata della batteria e il comportamento multimodale configurato in modo intelligente vi offrono tutta l’affidabilità e la versatilità di cui avete bisogno.
Date un’occhiata più da vicino alla nostra rivoluzionaria tecnologia LP-GPS per capire come ci siamo riusciti!
GPS (Sistema di posizionamento globale) è il Sistema Globale di Navigazione Satellitare più utilizzato per fornire dati di posizionamento e temporizzazione continui. Il GPS è una costellazione di satelliti che trasmette continuamente un segnale radio contenente lo stato dei satelliti, informazioni sull’orologio, dati sulle effemeridi che forniscono una posizione precisa dei satelliti e un almanacco che definisce le orbite di tutti i satelliti.
Un ricevitore GPS intercetta i segnali dei satelliti visibili per determinare la distanza di ciascun satellite. Queste distanze, combinate con i dati delle effemeridi, permettono di calcolare la posizione del ricevitore con la tecnica chiamata “trilaterazione”. Come minimo, quattro satelliti devono essere in vista del ricevitore per poter calcolare quattro quantità sconosciute: latitudine, longitudine, altitudine e deviazione dell’orologio dall’ora del satellite. In un tipico dispositivo GPS, tutta l’elaborazione viene effettuata dal chipset, che richiede molto tempo di elaborazione e quindi energia.
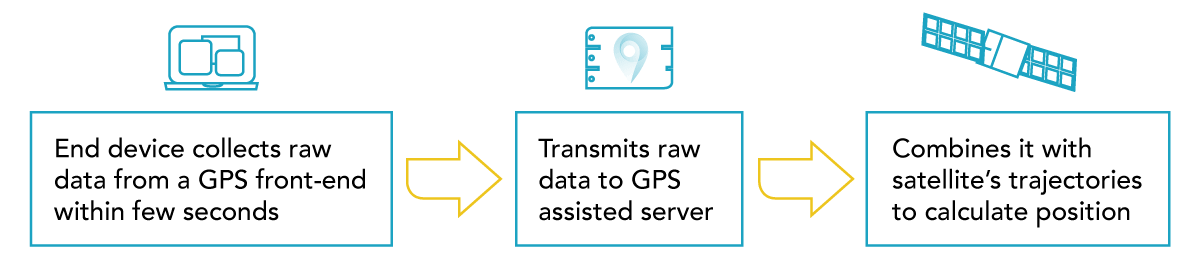
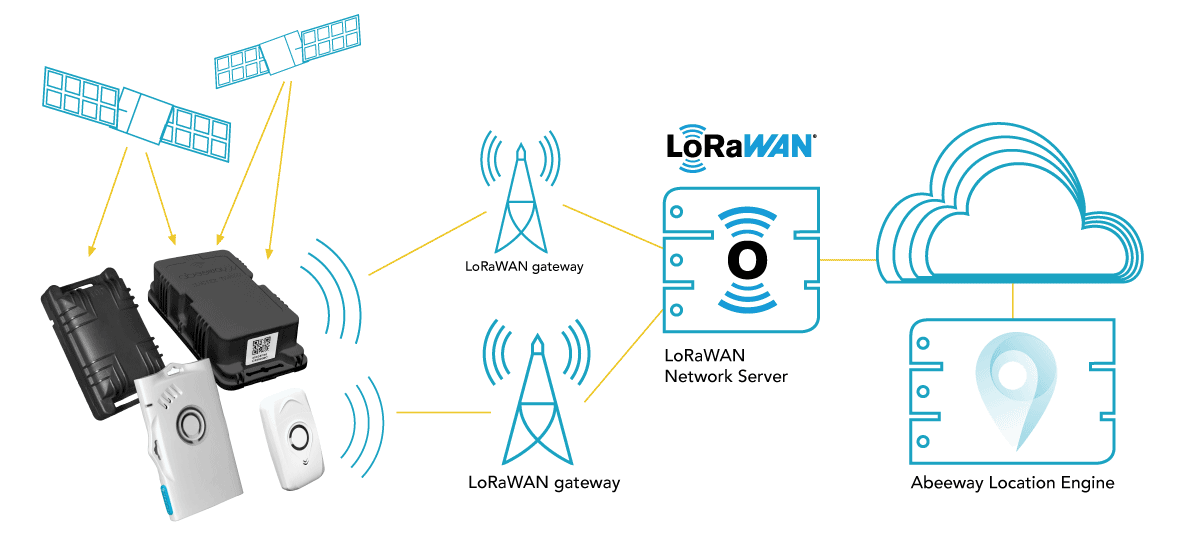
Con la tecnologia Low Power GPS, il tracker raccoglie solo i dati grezzi dai satelliti e li trasmette al server di geolocalizzazione di Abeeway attraverso la rete LPWAN (ad esempio LoRAWAN). Il server combina queste informazioni con le traiettorie satellitari note per calcolare la posizione finale. I dati sulle effemeridi e sull’almanacco sono già disponibili sul server e non devono essere raccolti dal dispositivo, con un notevole risparmio di energia per il tracker e un miglioramento del tempo di acquisizione del segnale GPS. Pertanto, l’intera lavorazione viene effettuata “nel cloud”, che è molto più veloce di quello interno al dispositivo e non spreca energia per i calcoli.
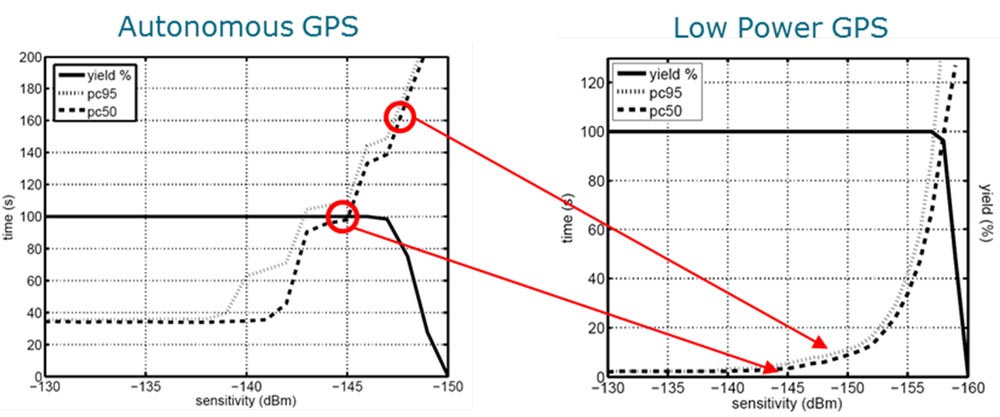
Nelle reti asincrone, come le reti LoRaWAN, il ritardo di trasmissione è deterministico: L’algoritmo LP-GPS brevettato da Abeeway sfrutta le informazioni temporali della rete per calcolare le posizioni con soli 3 satelliti, aumentando ulteriormente i tassi di successo e migliorando ulteriormente il Time-to-First Fix e il consumo energetico.
Prova di guida con un tracker che segnala posizioni successive con GPS/LP GPS/WIFI. Si evince che nelle aree urbane il GPS a bassa potenza è di gran lunga superiore al GPS. Il localizzatore è stato inizialmente collocato in un’auto parcheggiata sottoterra. Il normale GPS è stato in grado di fornire un primo fix dopo circa 20 minuti, mentre durante questo periodo l’LP-GPS e lo sniffing WiFi hanno ottenuto più di una dozzina di fix.

Abeeway Location Engine, che sfrutta diverse tecnologie di geolocalizzazione, tra cui LP-GPS, è integrato in ThingPark® Location di Actility, la soluzione ideale per i casi d’uso di tracciamento IoT. Combina la comunicazione a basso consumo utilizzando LoRaWAN®, con algoritmi avanzati di risoluzione della posizione e tecnologie di localizzazione a basso consumo utilizzando Wifi e GPS con ottimizzazione brevettata per vincoli IoT a basso consumo.
